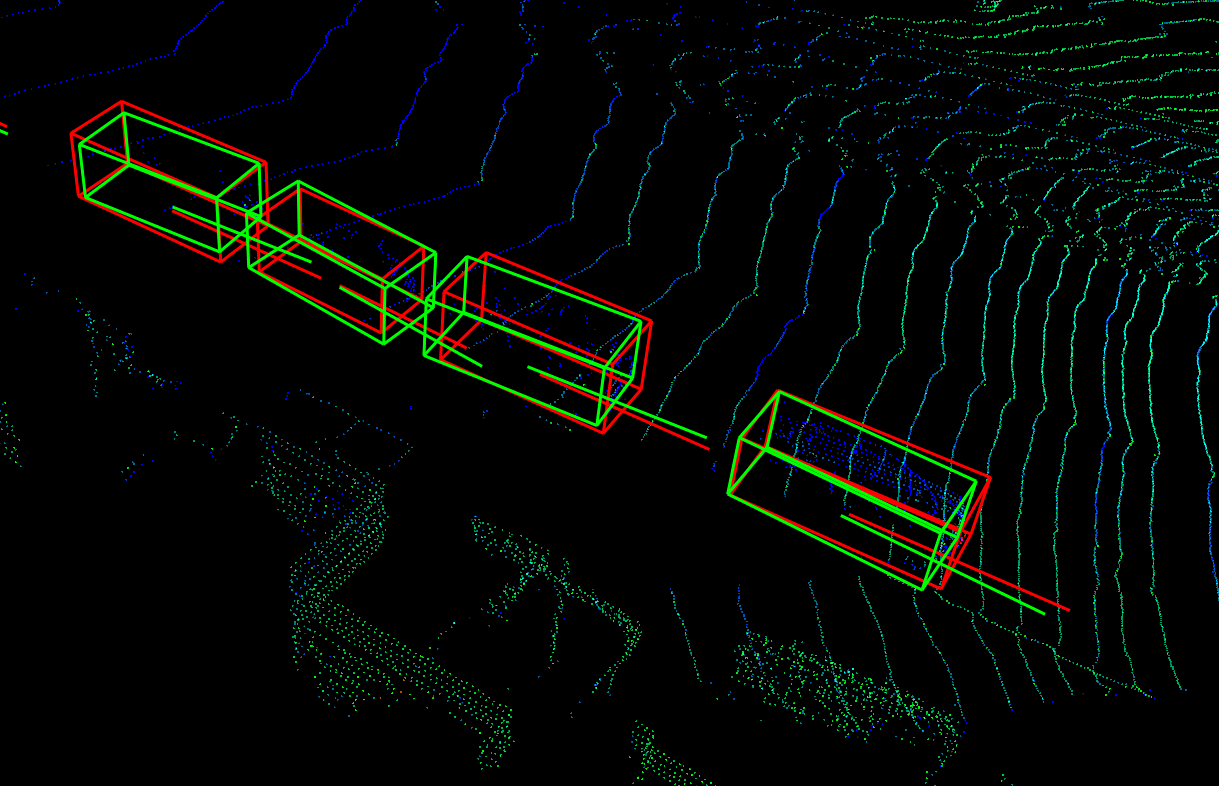
RGB-LIDAR 3D Object Detection
Fusing RGB and LiDAR data to detect objects in 3D with custom YOLO head

Fusing RGB and LiDAR data to detect objects in 3D with custom YOLO head

Transfer Artistic Styles

AI-generated music video from lyrics
Using GAN to edit pictures

Using AI to create cat pictures

Using Learned Features for SLAM. Report.
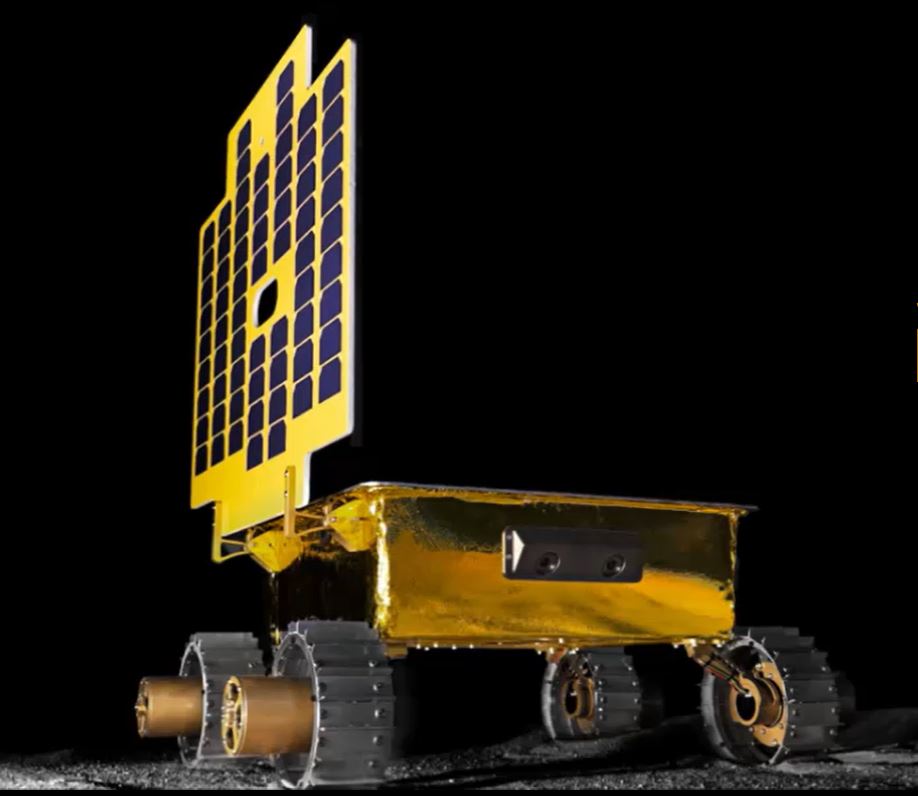
Worked on camera perception module on an Autonomous Moon Rover
Using PointCloud and SLAM to create dense 3D Reconstruction
Implementation of Monte Carlo Localization Demo.

Design and Implementation of an Autonomous Buggy.

Design and Implementation of a Vertical Take-Off & Landing Autonomous Quadplane Hybrid. Report.

Design and Implementation of a UAV that can be fitted into a tube.
Using UKF to track vehicles position wrt to ego.
Using RANSAC Plane Segmentation, Euclidean Clustering, and PCA to fit Bbox to LiDAR pointclouds.

Exactly what it sounds like. Presentation.
Tracking objects along multiple frames

Fusing multiple B&W images to create a colored image